精度與速度提供者
專(zhuan)業(ye)齒輪制造-專(zhuan)注(zhu)傳(chuan)動領域發展(zhan)
聯系電話
專(zhuan)業(ye)齒輪制造-專(zhuan)注(zhu)傳(chuan)動領域發展(zhan)
聯系電話

齒(chi)輪驅動的(de)(de)設(she)計不(bu)合(he)理會導致傳(chuan)動元件壽(shou)命(ming)(ming)縮短的(de)(de)現象。而通(tong)過傳(chuan)動元件的(de)(de)強度匹配可以(yi)有(you)效(xiao)的(de)(de)解決這個問題,從(cong)而提(ti)高齒(chi)輪的(de)(de)傳(chuan)動壽(shou)命(ming)(ming)。

圓柱(zhu)齒輪振動的(de)(de)一種簡(jian)便診(zhen)斷方法。簡(jian)單(dan)診(zhen)斷的(de)(de)目(mu)的(de)(de)是(shi)快速判斷齒輪是(shi)否(fou)處于正常工(gong)作(zuo)狀態,并(bing)進(jin)(jin)一步對處于異常工(gong)作(zuo)狀態的(de)(de)圓柱(zhu)齒輪進(jin)(jin)行(xing)精確(que)診(zhen)斷分析或(huo)采(cai)取其他措(cuo)施。當然,在許多(duo)情況下,在對振動進(jin)(jin)行(xing)簡(jian)單(dan)分析的(de)(de)基礎上(shang),也可以診(zhen)斷出一些明顯的(de)(de)故障。
本(ben)文對直齒(chi)(chi)銑削銷(xiao)加(jia)工質量的(de)問題(ti)分析(xi)如下,可供參考和(he)了解(jie),位置不清或相關(guan)需要,可以找iHF合發齒(chi)(chi)輪(lun)加(jia)工廠家。直齒(chi)(chi)輪(lun)銑削銷(xiao)五種質量問題(ti)的(de)原因分析(xi):
齒(chi)輪(lun)軸是齒(chi)輪(lun)箱(xiang)中(zhong)廣泛(fan)使用的(de)一種(zhong)齒(chi)輪(lun)。齒(chi)輪(lun)加(jia)工精(jing)度直接(jie)決定和影響整個變速箱(xiang)的(de)運行質(zhi)量(liang)。齒(chi)輪(lun)軸的(de)精(jing)度應主(zhu)要集中(zhong)在三個方面(mian):運動精(jing)度、光(guang)滑度精(jing)度和接(jie)觸精(jing)度。讓我(wo)們談談齒(chi)輪(lun)軸滾齒(chi)加(jia)工中(zhong)容易出現的(de)五種(zhong)誤差(cha),并分析其原因。

斜(xie)齒(chi)(chi)輪不(bu)完全是螺(luo)旋齒(chi)(chi)輪,應該說(shuo),螺(luo)旋齒(chi)(chi)輪是兩(liang)個(ge)斜(xie)齒(chi)(chi)輪的嚙(nie)合方式(shi),由它們在空間傳遞力的方向不(bu)同(tong)來區分。普通的直(zhi)齒(chi)(chi)輪沿齒(chi)(chi)寬同(tong)時進(jin)入嚙(nie)合,因而產生沖(chong)擊振動噪音,傳動不(bu)平穩(wen)。斜(xie)齒(chi)(chi)圓柱齒(chi)(chi)輪傳動則優于(yu)(yu)直(zhi)齒(chi)(chi),且可湊緊中(zhong)心距用于(yu)(yu)高(gao)速重載。

斜齒(chi)圓柱(zhu)齒(chi)輪(lun)的端面(mian)齒(chi)廓(kuo)為準確(que)的漸開線,法面(mian)齒(chi)廓(kuo)為精確(que)的漸開線,如圖8.27 所(suo)示。它的端面(mian)與(yu)法面(mian)參數不相同
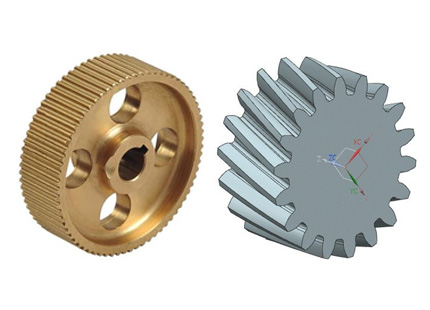
(1)模具加(jia)工因(yin)素(su)。直(zhi)齒(chi)的(de)(de)模仁齒(chi)圈(quan)可(ke)以采用(yong)高精(jing)度的(de)(de)慢走絲線割(ge),其線割(ge)的(de)(de)質量非(fei)常高。(2)注(zhu)塑因(yin)素(su)。直(zhi)齒(chi)出模可(ke)以直(zhi)接頂出,但是斜齒(chi)必須(xu)旋出。斜齒(chi)旋轉(zhuan)出模時由于受力的(de)(de)因(yin)素(su),塑膠齒(chi)輪導(dao)致出模時受力較大,所以導(dao)致斜齒(chi)出模過程中(zhong)有較大的(de)(de)變(bian)形(xing)。
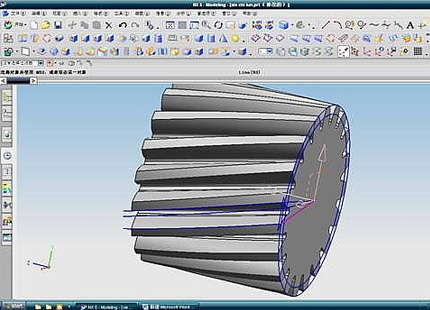
摸索出畫(hua)斜齒輪的方法,與大家(jia)分享一(yi)下(xia)。(齒數(shu)<41 大于(yu)41的更好(hao)畫(hua)的)打開工(gong)具→表達式(shi),輸入參(can)數(shu)。確(que)定(ding)后(hou)打開 規律曲線(xian),在出現的規律函(han)數(shu)對話框(kuang)中點(dian)(dian)擊根據(ju)方程,依次確(que)定(ding)X 、Y、 Z的參(can)數(shu)表達式(shi),什(shen)么都別改,一(yi)直(zhi)點(dian)(dian)確(que)定(ding)。到最后(hou)確(que)定(ding)基點(dian)(dian)和坐標系(xi)的方位也確(que)定(ding)就好(hao)。得(de)到的漸(jian)開線(xian)如下(xia)圖。
189 2935 7195
地址:深圳市(shi)龍(long)華區大浪創藝(yi)路16號安宏基(ji)工業園(yuan)C棟
電話 :18929357195
QQ:2850623673

微信聯系我們
Copyright ? 深圳市合(he)發齒輪機械有限公司
189 2935 7195
地址:深圳市龍華區大浪(lang)創藝路16號安宏(hong)基工業園(yuan)C棟(dong)
電話 :18929357195
QQ:2850623673
微信聯系我們


